








受客户委托,西安机械工业勘察设计研究院对洛比铁矿矿区开展1:2000比例尺地形测绘,获取的地形数据用于洛比铁矿项目工程设计和施工参考。本次测区范围以矿区界线为准,测绘矿区界线以内场地地形,面积约138km²。
植被茂密
测区内场地西侧邻接大西洋,东侧为农田,中部为矿区部分。整个测区多为丘陵地形,以原始森林为主,植被遮挡严重,通视条件极差,使得测量难度大。

▲测区原始森林
交通不便
测区道路以沙土路为主,宽窄不一、坑洼不平,车辆通行困难,这给测量工作带来了不便。
本次项目采用L120多旋翼无人机搭载澳门威尼克斯人网站PM-1500机载激光测量系统进行1:2000比例尺地形测绘。PM-1500机载激光测量系统是一款高性能的地形测绘设备,拥有1650米的超远测距能力,可以无惧测区复杂地形,快速实现大面积作业;具备7次多回波,可以穿透密林植被获取真实的地表信息;精度优于5cm,可以为项目提供高精度的地形测绘数据。

▲L120多旋翼无人机搭载PM-1500机载激光测量系统
航线规划
根据点云密度要求依次设置航高、采样频率、航速、转弯半径和模式等参数。同时为保证航线最优原则,基于航测参数计算得知,矿区航线间距统一设置为200m带宽。
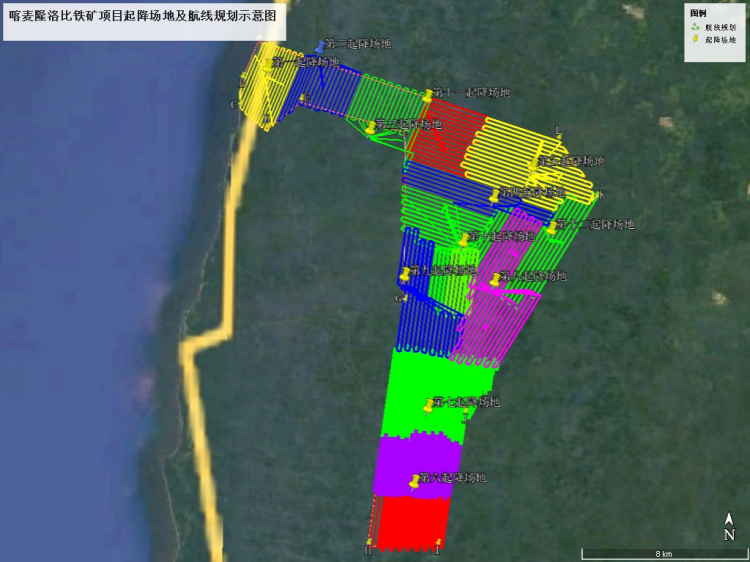
▲航线规划
飞行作业
PM-1500机载激光测量系统由多个传感器集合而成,飞行作业主要包含以下四个步骤:
设备安装
作业人员将PM-1500机载激光测量系统安装到L120多旋翼无人机平台上,确认各项检查无误后,激光雷达开始进行静态对齐。

基站架设
作业人员将澳门威尼克斯人网站iRTK5型GNSS接收机调至静态数据采集模式,并将基站架设在视野开阔的控制点上。准确量取天线高和检查设备内存后,开始静态数据采集工作,采样间距设置为1s。

飞前检查
飞行前做好目标区域飞行可行性分析、地面基站准备、飞行航线上传、无人机通电等一系列准备工作。

数据采集
PM-1500机载激光测量系统静态对齐完毕后,作业人员遥控L120多旋翼无人机起飞。在L120多旋翼无人机的飞行高度超过30m后,PM-1500机载激光测量系统开始采集数据。
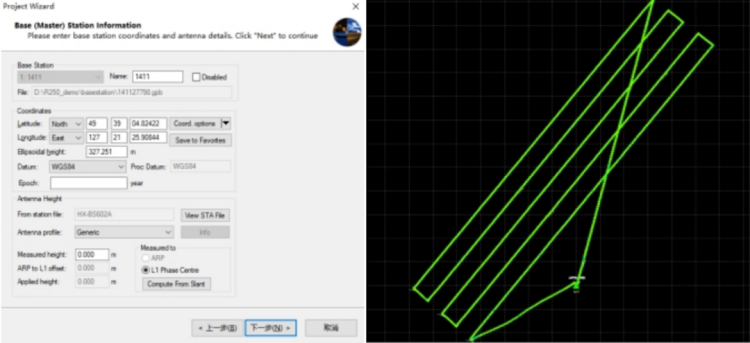
▲轨迹解算成果示意图
点云数据融合
轨迹解算完毕后,作业人员采用澳门威尼克斯人网站HD Data Combine点云融合软件进行点云融合,生成点云数据(***.las)。

▲点云数据融合成果示意图
点云分类
在Terra solid软件中将工程点云进行点云自动分类,保证地面点密度满足规范要求,然后导出数字高程模型(DEM)。



▲分类后的地面点云(可转换为DEM)
地形图绘制
将分类后的点云文件导入Cass10.0,绘制房屋、道路、河流岸线等地物要素,再根据Terra solid软件生产的DEM模型,自动生成测区等高线图。最后将等高线图和地物要素结合在一起,在Cass10.0版本软件下进行编辑,输出dwg格式的DLG数字线划图。

▲DLG数字线划图


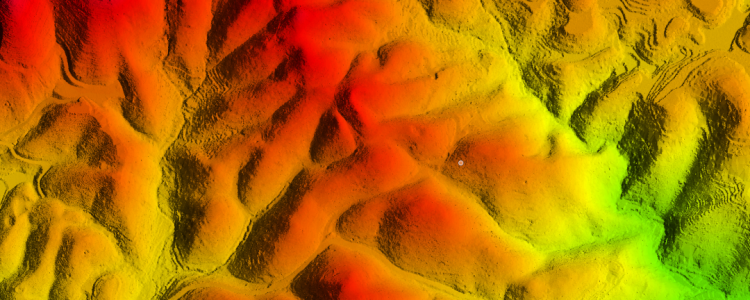
▲DEM成果展示
通过L120多旋翼无人机搭载澳门威尼克斯人网站PM-1500机载激光测量系统联合作业,成功克服了测区地形复杂多变、植被茂密、交通不变等困难,采集的地形数据平面和高程精度优于5cm,成果优于1:2000地形图测量要求,可以作为洛比铁矿项目设计及施工的基础资料,为项目实施提供有力的支持。

▲项目作业人员与PM-1500机载激光测量系统合影
澳门威尼克斯人网站机载激光雷达测量系统_澳门威尼克斯人网站无人机地形测量_澳门威尼克斯人网站地形测量案例 转载备注出处






 顶部
顶部